自动化设备配置SMC气缸时,如虹精工把动作需求和现场工况放在一起核对。推力、行程、速度、节拍、安装空间和供气压力要先对应清楚,电磁阀、调速阀、磁性开关也不能孤立看。用于包装线推料、电子夹具夹紧或检测设备顶升时,偏载磨损、末端冲击和速度波动往往来自选型边界没算进去。判断重点是先确认匹配关系,再谈稳定运行。
一台自动化设备要不要用SMC气缸,通常不是从“选哪个系列”开始的。现场更常见的情况是:机构已经有一个动作,比如推一下、夹一下、顶起来、挡住料,再把这个动作交给气缸完成。问题也往往出在这里。动作能跑起来,不代表这只气缸适合长期跑。
把动作需求和现场工况对应清楚,才是选型的起点。
先看动作本身。推料、夹紧、顶升、压合、挡停,听起来都是一个简单的直线动作,但它们对气缸的要求并不一样。推料更关心行程和速度是否顺,夹紧更关心末端保持力,顶升要看负载重量和重心位置,挡停则要考虑冲击和重复动作后的松动。只用“行程多少、缸径多大”去描述需求,信息是不够的。

比较稳妥的做法,是先把动作拆成几个具体问题:负载有多重,受力方向是水平还是垂直,动作末端是否需要压紧,允许多快到位,有没有到位检测,失败以后会不会影响下一道工序。比如一个包装线上的推盒动作,看似只要把盒子推出去,但如果节拍高、盒子位置有偏差、导轨摩擦变化大,气缸就不能只按理论推力贴边选。现场调试时能推出去,连续运行几小时后速度变慢、撞击变大,问题就会慢慢露出来。
再看现场工况。气缸装在哪里,比气缸本身的参数更早影响使用效果。有些设备空间很紧,气缸后端没有拆装余量,后期换密封件或调传感器都很麻烦;有些夹具存在偏载,活塞杆长期受侧向力,普通气缸会比预期磨得更快;还有些工位靠近粉尘、水汽或油雾,接头、气管和传感器的状态会直接影响动作稳定性。
所以,现场工况要对应到结构选择。负载有偏心,就不要只让活塞杆承受弯矩,应考虑外部导轨、导杆气缸或更合理的机构支撑。末端冲击明显,就要看缓冲方式、调速阀位置和阀的响应,而不是只把供气压力调低。垂直顶升动作还要考虑断气后的下滑风险,必要时配合机械限位、锁紧或其他保持措施。能动是一回事,失气、卡料、连续高频运行时会怎样,是另一回事。

速度和节拍也要分开看。很多现场说“动作要快”,其实真正需要的是节拍稳定。气缸动作速度受缸径、行程、负载、阀流量、管路长度、调速方式和供气压力共同影响。管子拉得很长,阀离气缸很远,响应就会拖;调速阀只顾开大,末端就可能撞得响;缓冲没调好,传感器虽然给了到位信号,机构已经在承受冲击。高频设备上,这类小问题会放大成漏气、松动、定位漂移。
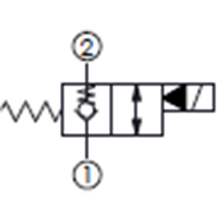
配置SMC气缸时,还要把周边件一起考虑。电磁阀、过滤减压阀、接头、气管、磁性开关、安装支架都不是附属小件。气源含水多,密封寿命会受影响;接头方向不合理,气管长期弯折,动作会忽快忽慢;磁性开关位置留得太极限,现场一振动就可能误触发。气缸是执行元件,但它的表现来自整个气动回路和机械安装。
有经验的设备工程师通常不会把缸径选得太“刚好”。理论输出力要结合实际压力、摩擦、负载变化和安全余量来看。尤其是夹紧、压合、顶升这类动作,余量不足时,调试阶段可能靠提高压力解决,后面却容易带来冲击、噪声和寿命问题。反过来,缸径过大也不是好事,耗气量增加,动作惯性变大,机构空间也会被占掉。

维护条件也要在设计阶段想清楚。气缸安装后,调速阀能不能伸手调到,磁性开关能不能更换,接头漏气时能不能看到,固定螺丝有没有工具空间,这些问题在图纸上很容易被忽略。设备交付以后,维修人员不会关心当初参数表多漂亮,只会关心停机时能不能快速判断问题、换件后能不能恢复原来的节拍。
因此,动作需求和现场工况的对应关系,可以用一句话概括:动作决定气缸要完成什么,工况决定它能不能稳定地完成。前者对应推力、行程、速度、到位确认和控制方式;后者对应安装、导向、缓冲、防护、供气质量和维护空间。
自动化设备配置SMC气缸时,真正要避免的是把选型变成简单套型号。先把动作拆细,再把现场条件摆出来,最后再落到缸径、行程、结构形式和配套元件。这样选出来的气缸,不只是调试时能动,而是能在设备节拍里长期、重复、少出问题地运行。